El funcionamiento de la navegación por WiFi: trilateración y RSSI explicados
Esta guía autorizada detalla el funcionamiento técnico de la navegación por WiFi, explicando cómo las mediciones de trilateración y RSSI determinan la ubicación del dispositivo. Proporciona estrategias de implementación prácticas, metodologías de calibración y mejores prácticas arquitectónicas para los responsables de TI que despliegan servicios de ubicación en recintos corporativos.
Escuchar esta guía
Ver transcripción del podcast

執行摘要
對於企業級場域營運商而言,部署有效的室內定位服務不僅僅是在空間中佈滿基地台。WiFi 導航的基本機制——三邊測量(Trilateration)與接收訊號強度指示(RSSI)量測——決定了任何成功部署的架構要求。本指南深入探討了您現有的無線基礎設施如何確定裝置位置的技術原理、影響精準度的關鍵環境變數,以及提供可靠定位智慧所需的部署標準。
理解這些機制對於負責提供循序導航、資產追蹤或人流量分析的 IT 經理和網路架構師至關重要。我們將探討訊號強度與距離之間的對數關係、嚴格校準的必要性,以及如何整合如 Purple 等與硬體無關的分析平台,從您的射頻(RF)環境中提取具備商業價值的洞察。
收聽我們的隨附播客簡報:
技術深度探討
RSSI 與三邊測量的基本原理
WiFi 導航的核心是依賴現有的無線基礎設施來確定用戶端裝置的物理位置。其主要機制是三邊測量,這經常被錯誤地稱為三角測量(Triangulation)。三角測量是根據角度計算位置,而三邊測量則是透過測量與已知參考點的距離來確定位置。
在 WiFi 的情境中,這些參考點就是您的存取點(AP)。距離估算是源自於接收訊號強度指示 (RSSI)。RSSI 是對接收到的無線電訊號中存在之功率的量測,以相對於毫瓦的分貝(dBm)表示。
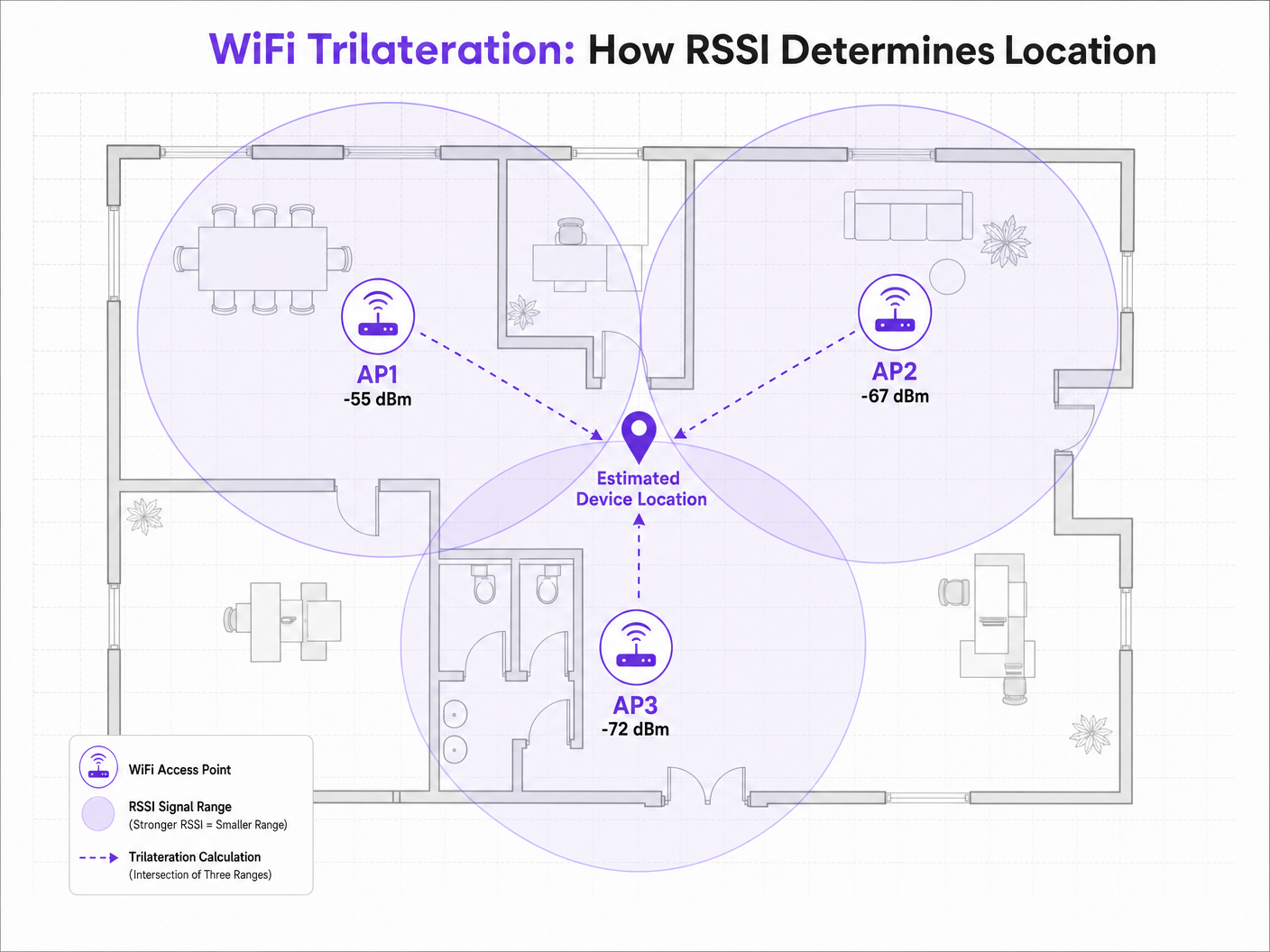
當用戶端裝置(例如廣播探測請求的智慧型手機)被 AP 偵測到時,AP 會記錄 RSSI。由於射頻(RF)訊號在空間中傳播時會衰減(失去功率),因此 RSSI 值可作為距離的替代指標。如果三個或更多 AP 偵測到同一台裝置並記錄其 RSSI,定位引擎就可以計算出與每個 AP 的估算距離,並繪製出虛擬的機率圓。這些圓圈的交點即代表估算的裝置位置。
路徑損耗模型
RSSI 與距離之間的關係並非線性,而是遵循對數路徑損耗模型。定位引擎使用的標準公式為:
RSSI = -10 * n * log10(d) + A
其中:
- d 是與存取點(AP)的距離。
- n 是路徑損耗指數,代表訊號在特定環境中衰減的速度。在自由空間真空中,n 恰好為 2.0。在密集的室內環境中,n 的範圍可能在 3.0 到 4.5 之間。
- A 是在距離 AP 恰好 1 公尺處測得的參考 RSSI。
此公式突顯了為何環境校準至關重要。在具有混凝土牆的 Hospitality 環境中部署,其路徑損耗指數將與寬敞開放的 Retail 賣場顯著不同。在不同環境中皆假設標準的 n 值,是導致導航精確度不佳的主因。
2.4 GHz 與 5 GHz 定位比較
雖然 2.4 GHz 頻段對物理障礙物有較好的穿透力,但此特性實際上不利於精準定位。較大的傳播範圍意味著較大的距離估算圓,進而導致較寬的交會區域和較低的定位解析度。
5 GHz 頻段衰減較快,能提供更緊密的訊號邊界和更細緻的距離估算。為了獲得最佳的導航精確度,定位引擎應優先處理 5 GHz 的 RSSI 數據。此原則也適用於較新的標準;雖然 Wi-Fi 6 提高了整體網路效率,但 RSSI 定位的基本機制仍保持不變,不過在 Wi-Fi 6E 中引入的 6 GHz 頻段提供了更高的通道密度和潛在的解析度優勢。如需了解更多相關資訊,請參閱我們的指南: Wi-Fi 6 vs Wi-Fi 5: Does it Solve Channel Interference? 。
實作指南
存取點密度與配置
導航部署中最常見的失敗模式是 AP 密度不足。純粹為連線設計的網路(例如提供 Guest WiFi 存取)通常缺乏可靠三邊測量所需的密度。
為了實現可靠的定位,用戶端裝置必須同時被至少三個 AP 「聽到」,且 RSSI 需達到 -75 dBm 或更佳。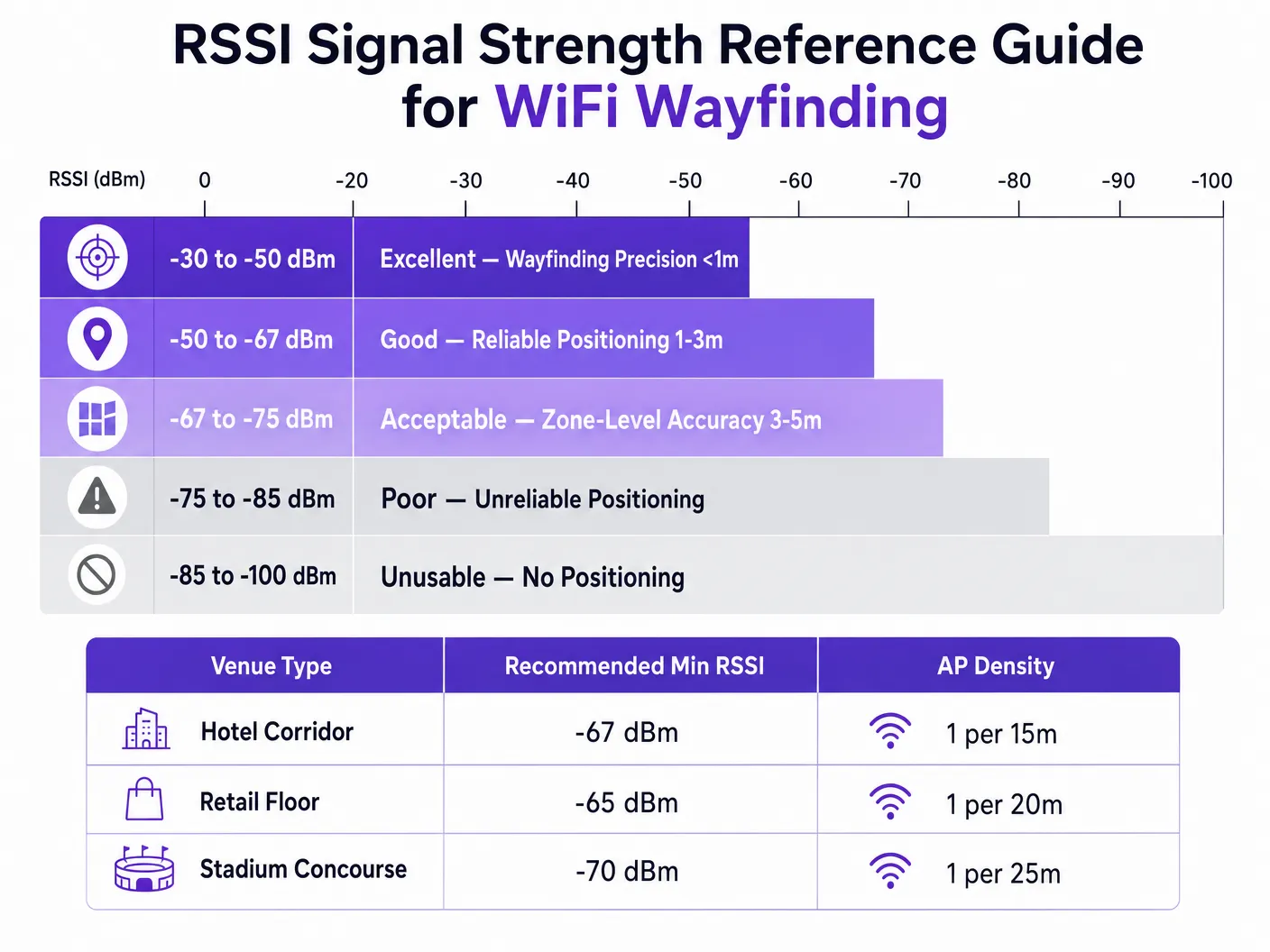
若要達到 3 到 5 公尺的目標精確度,一般的經驗法則是每 15 到 20 平方公尺部署一台 AP,具體取決於環境。此外,AP 應放置在目標區域的周邊,而不僅僅是沿著走廊中心放置,以確保訊號圓的交點形成一個明確的點,而不是一條直線。
校準方法
準確的距離估算需要針對特定的射頻(RF)環境校準定位引擎。主要有兩種方法:
- RF 指紋定位(RF Fingerprinting): 這涉及攜帶檢測設備實際走訪場域,記錄已知座標處的 RSSI 值,並建立一個完整的對照表。定位引擎隨後會將即時的 RSSI 讀數與該資料庫進行比對。這能提供最高的精確度,但非常耗費人力,且如果物理環境發生變化(例如季節性零售陳列),則必須重複此過程。
- 基於模型的定位(Model-Based Positioning): 此方法使用路徑損耗公式,並結合系統中定義的環境參數(牆壁類型、天花板高度)。它的部署和維護速度更快,雖然精確度略低於指紋定位,但對於區域級分析和大致的導航來說通常已經足夠。
最佳實踐
減輕多路徑干擾
在具有高反射表面的環境中(例如玻璃店面、金屬固定裝置或體育場座椅),RF 訊號會發生折射,透過多條路徑到達接收器。這種多路徑干擾會扭曲 RSSI 讀數,因為接收器測量的是直接訊號和反射訊號的總和,而不是乾淨的視線距離。
減輕多路徑干擾需要結合策略性的 AP 部署(避免高度反射的角落)、嚴格的校準,以及定位引擎內部的智慧過濾演算法,以捨棄異常的 RSSI 突波。
隱私與合規性
透過 MAC 位址收集位置數據時(即使是透過探測請求進行被動收集),IT 團隊也必須確保符合 GDPR 等區域隱私框架。
現代行動作業系統實施的 MAC 位址隨機化,可防止在未經身分驗證的情況下對個人裝置進行長期追蹤。然而,這並不會阻礙整體的客流量分析。為了提供個人化的逐向導航或個人化互動,場域必須取得明確的同意。
這就是整合 Captive Portal 變得至關重要的原因。透過要求使用者進行驗證(例如利用類似 How a wi fi assistant Enables Passwordless Access in 2026 的解決方案),場域營運商可以合法地將裝置與個人進行關聯,並提供加入(opt-in)定位服務。Purple 的平台在 Connect 授權下可作為免費的身分識別提供者,在簡化此合規性要求的同時,提供豐富的 WiFi Analytics 。
疑難排解與風險緩釋
當導航精準度下降時,IT 團隊應系統性地評估以下因素:
- 環境偏移: 場域內是否發生了物理變化(例如新牆面、密集的庫存),導致原始校準失效?
- AP 功率電平: 無線電資源管理 (RRM) 演算法是否在動態調整發射功率?定位引擎依賴穩定的參考點;劇烈的動態功率調整會使距離計算產生偏差。
- 用戶端裝置差異: 不同的智慧型手機製造商使用不同的天線設計,這意味著 Samsung 和 iPhone 在完全相同的位置可能會回報不同的 RSSI 值。先進的定位引擎會使用裝置設定檔來使這些讀數標準化。
投資報酬率與商業影響
部署強大 WiFi 導航的商業案例遠不止於在地圖上顯示一個藍點。對於技術長或場域營運總監而言,投資報酬率是透過營運效率和數據驅動的決策來實現的。
在 Transport 樞紐中,精準的定位能夠根據即時旅客密度進行動態排隊管理和人員調度。在醫療照護環境中,它有助於對高價值醫療設備進行資產追蹤,從而減少採購浪費。
透過在像 Purple 這樣與硬體無關的平台上進行標準化,企業可以提取此定位智慧,而不會被綁定在單一基礎架構廠商中,從而確保長期彈性並最大化其現有無線投資的報酬。正如我們最近的公告 Purple Appoints Iain Fox as VP Growth – Public Sector to Drive Digital Inclusion and Smart City Innovation 中所強調的,此技術的應用正迅速擴展到智慧城市基礎架構中,展現了其可擴展的價值。
Definiciones clave
RSSI (Indicador de fuerza de la señal recibida)
Una medida de la potencia presente en una señal de radio recibida, expresada en decibelios en relación con un milivatio (dBm).
La métrica fundamental utilizada por los motores de posicionamiento para estimar la distancia entre un dispositivo cliente y un punto de acceso.
Trilateración
El proceso de determinar ubicaciones absolutas o relativas de puntos mediante la medición de distancias, utilizando la geometría de círculos, esferas o triángulos.
El algoritmo matemático utilizado por los motores de localización para calcular la posición de un dispositivo basándose en estimaciones de distancia desde múltiples puntos de acceso.
Exponente de pérdida de trayectoria (n)
Una variable en el modelo de propagación de RF que representa el ritmo al que la fuerza de la señal se degrada con la distancia en un entorno específico.
Crítico para la calibración; un estadio abierto tendrá un exponente de pérdida de trayectoria menor que un entorno de oficina denso con paredes de hormigón.
RF Fingerprinting
Una técnica de calibración en la que se inspecciona físicamente un recinto para registrar los valores reales de RSSI en coordenadas específicas, creando una base de datos de consulta.
Utilizado cuando se requiere un guiado (wayfinding) de alta precisión, aunque conlleva un elevado coste de mantenimiento operativo.
Interferencia multicamino
Un fenómeno en física de radio en el que las señales de RF llegan a la antena receptora a través de dos o más trayectorias debido a la reflexión en las superficies.
Una de las principales fuentes de imprecisión en el guiado (wayfinding), especialmente en recintos con vidrio, metal o características arquitectónicas complejas.
Aleatorización de direcciones MAC
Una función de privacidad en los sistemas operativos móviles modernos en la que el dispositivo transmite una dirección MAC temporal y aleatoria durante las solicitudes de sonda (probe requests).
Afecta a la capacidad de realizar un seguimiento de los dispositivos individuales a lo largo del tiempo sin autenticación de red, lo que obliga a los recintos a adaptar sus estrategias de analítica.
Probe Request (Solicitud de sonda)
Una trama enviada por un dispositivo cliente para determinar qué puntos de acceso están dentro del alcance.
El mecanismo principal para el seguimiento pasivo de la ubicación, que permite a los puntos de acceso registrar el RSSI de los dispositivos incluso si no están conectados a la red.
Posicionamiento basado en modelos
Un método de cálculo de ubicación que se basa en algoritmos matemáticos e hipótesis ambientales en lugar de inspecciones físicas del terreno.
El modelo de implementación preferido para analíticas escalables en múltiples sedes, donde la precisión a nivel de zona es suficiente.
Ejemplos prácticos
Un hotel resort de 400 habitaciones experimenta una navegación sumamente imprecisa en sus pasillos de huéspedes, con el «punto azul» saltando con frecuencia entre plantas adyacentes. La red se diseñó originalmente para una conectividad básica, con AP colocados cada 30 metros en línea recta por el centro de los pasillos.
El equipo de TI debe rediseñar la arquitectura de RF para los servicios de ubicación. En primer lugar, aumente la densidad de AP a aproximadamente uno cada 15 metros para garantizar que un mínimo de tres AP puedan «escuchar» a un dispositivo cliente a -67 dBm o mejor. En segundo lugar, alterne la ubicación de los AP (por ejemplo, alternando los lados del pasillo o utilizando habitaciones adyacentes) en lugar de una línea recta. Un despliegue en línea recta hace que los círculos de trilateración se crucen en dos puntos distintos, lo que genera ambigüedad. Por último, implemente la calibración de RF fingerprinting específicamente en los pasillos para tener en cuenta el alto exponente de pérdida de trayectoria causado por las puertas cortafuegos y las paredes de hormigón.
Una gran cadena minorista desea implementar análisis a nivel de zona para medir el tiempo de permanencia en departamentos específicos (por ejemplo, Electrónica frente a Moda) utilizando su infraestructura Cisco existente. Desean evitar la sobrecarga operativa de realizar RF fingerprinting manual en 50 ubicaciones.
Implemente un motor de posicionamiento basado en modelos integrado con los controladores de LAN inalámbrica de Cisco existentes a través de la API. El arquitecto de red debe definir los parámetros ambientales específicos (exponente de pérdida de trayectoria «n») para la distribución típica de la tienda. Asegúrese de que los WLC estén configurados para reportar datos RSSI tanto de clientes asociados como no asociados (solicitudes de sondeo). Superponga la plataforma de análisis de Purple para consumir este flujo de API, mapeando las coordenadas lógicas de los AP con el plano físico para establecer las zonas de análisis.
Preguntas de práctica
Q1. Está diseñando la infraestructura WiFi para un nuevo centro de conferencias. El requisito principal es una navegación paso a paso de alta precisión para los asistentes. El arquitecto propone colocar AP de alta densidad exclusivamente en el centro de las salas de exposición principales para minimizar los costes de cableado. ¿Aprobaría este diseño?
Sugerencia: Considere cómo se intersectan los círculos de trilateración cuando los AP se colocan en un clúster centralizado en comparación con un despliegue perimetral.
Ver respuesta modelo
No, este diseño debe rechazarse. Para una trilateración precisa, los AP deben colocarse en el perímetro del espacio para proporcionar diversos ángulos de intersección de la señal. La colocación centralizada de los AP dará como resultado círculos de señal superpuestos que no lograrán crear un punto de intersección definitivo, lo que provocará una alta ambigüedad posicional en los bordes de la sala.
Q2. Tras una reciente actualización de firmware en sus controladores LAN inalámbricos, el equipo de operaciones informa que las analíticas de tiempo de permanencia en las tiendas minoristas se han vuelto erráticas, y los dispositivos parecen "teletransportarse" entre zonas. No se han realizado cambios físicos en las tiendas.
Sugerencia: Considere qué características automatizadas de una actualización de firmware de WLC podrían habilitar o alterar con respecto a la gestión de RF.
Ver respuesta modelo
Investigue los ajustes de Gestión de Recursos de Radio (RRM) o de control dinámico de potencia de transmisión en el WLC. Las actualizaciones de firmware a menudo alteran la agresividad de estos algoritmos. Si los AP fluctúan rápidamente su potencia de transmisión para optimizar la conectividad, los cálculos de distancia del motor de ubicación (que dependen de una potencia de referencia estable) se verán completamente sesgados, provocando el efecto de "teletransporte". El RRM debe ajustarse para garantizar una potencia de transmisión estable en las zonas críticas para la ubicación.
Q3. El director de TI de un hospital quiere realizar el seguimiento de la ubicación de costosas máquinas de ecografía portátiles. Actualmente disponen de una red WiFi heredada diseñada para una cobertura básica (-75 dBm como mínimo). Se debaten entre actualizar la red WiFi para servicios de localización de alta densidad o desplegar una red paralela de balizas BLE (Bluetooth de baja energía).
Sugerencia: Evalúe el coste y las ventajas de precisión entre actualizar una red WiFi heredada frente a superponer una solución BLE dirigida para el seguimiento de activos.
Ver respuesta modelo
Para un seguimiento preciso de activos (por ejemplo, saber exactamente en qué habitación se encuentra una máquina), BLE suele ser la solución más rentable y precisa en este escenario. Actualizar una red WiFi heredada a la densidad requerida para una navegación de alta precisión (1 AP por cada 15 m²) requiere una inversión significativa en cableado y hardware. El despliegue de balizas BLE alimentadas por batería en los activos y receptores BLE en las habitaciones proporciona una mayor precisión (debido a un menor alcance y menor potencia) sin alterar la infraestructura WiFi existente.
Continúe leyendo esta serie
Cómo aprovechar el marketing por SMS en restaurantes para aumentar las visitas recurrentes
Cómo aprovechar las soluciones de marketing por SMS para aumentar las visitas recurrentes
Cómo aprovechar un ejemplo de marketing por SMS para aumentar las visitas recurrentes
Esta guía técnica detalla cómo los operadores de recintos pueden utilizar el marketing por SMS para impulsar visitas recurrentes medibles mediante la captura de datos telefónicos de origen (first-party) verificados a través de WiFi para invitados. Cubre la arquitectura de cumplimiento, los flujos de trabajo de implementación y las secuencias de interacción probadas para entornos de hostelería, comercio minorista y sector público.