A Mecânica do Wayfinding por WiFi: Trilateração e RSSI Explicados
Este guia de autoridade detalha a mecânica técnica do wayfinding por WiFi, explicando como as medições de trilateração e RSSI determinam a localização do dispositivo. Fornece estratégias de implementação práticas, metodologias de calibração e as melhores práticas de arquitetura para líderes de TI que implementam serviços de localização em espaços empresariais.
Ouça este guia
Ver transcrição do podcast

Resumo Executivo
Para os operadores de espaços empresariais, a implementação de serviços de localização indoor eficazes exige mais do que apenas cobrir um espaço com pontos de acesso. A mecânica fundamental do wayfinding por WiFi — trilateração e medições de Indicador de Força do Sinal Recebido (RSSI) — dita os requisitos arquitetónicos para qualquer implementação bem-sucedida. Este guia fornece uma análise aprofundada dos princípios técnicos sobre como a sua infraestrutura sem fios existente determina a posição do dispositivo, as variáveis ambientais críticas que afetam a precisão e os padrões de implementação necessários para fornecer inteligência de localização fiável.
Compreender esta mecânica é essencial para gestores de TI e arquitetos de rede encarregues de fornecer navegação passo a passo, rastreio de ativos ou análise de fluxo de visitantes. Exploramos a relação logarítmica entre a força do sinal e a distância, a necessidade de uma calibração rigorosa e a integração de plataformas de análise agnósticas de hardware como a Purple para extrair valor comercial acionável do seu ambiente de RF.
Ouça o nosso podcast informativo complementar:
Análise Técnica Aprofundada
Os Fundamentos do RSSI e da Trilateração
Na sua essência, o wayfinding por WiFi baseia-se na infraestrutura sem fios existente para determinar a localização física de um dispositivo cliente. O mecanismo principal para isso é a trilateração, que é frequentemente, e incorretamente, referida como triangulação. Enquanto a triangulação calcula a posição com base em ângulos, a trilateração determina a posição medindo distâncias a partir de pontos de referência conhecidos.
Num contexto de WiFi, estes pontos de referência são os seus pontos de acesso (APs). A estimativa de distância é derivada do Indicador de Força do Sinal Recebido (RSSI). O RSSI é uma medição da potência presente num sinal de rádio recebido, expressa em decibéis relativos a um miliwatt (dBm).
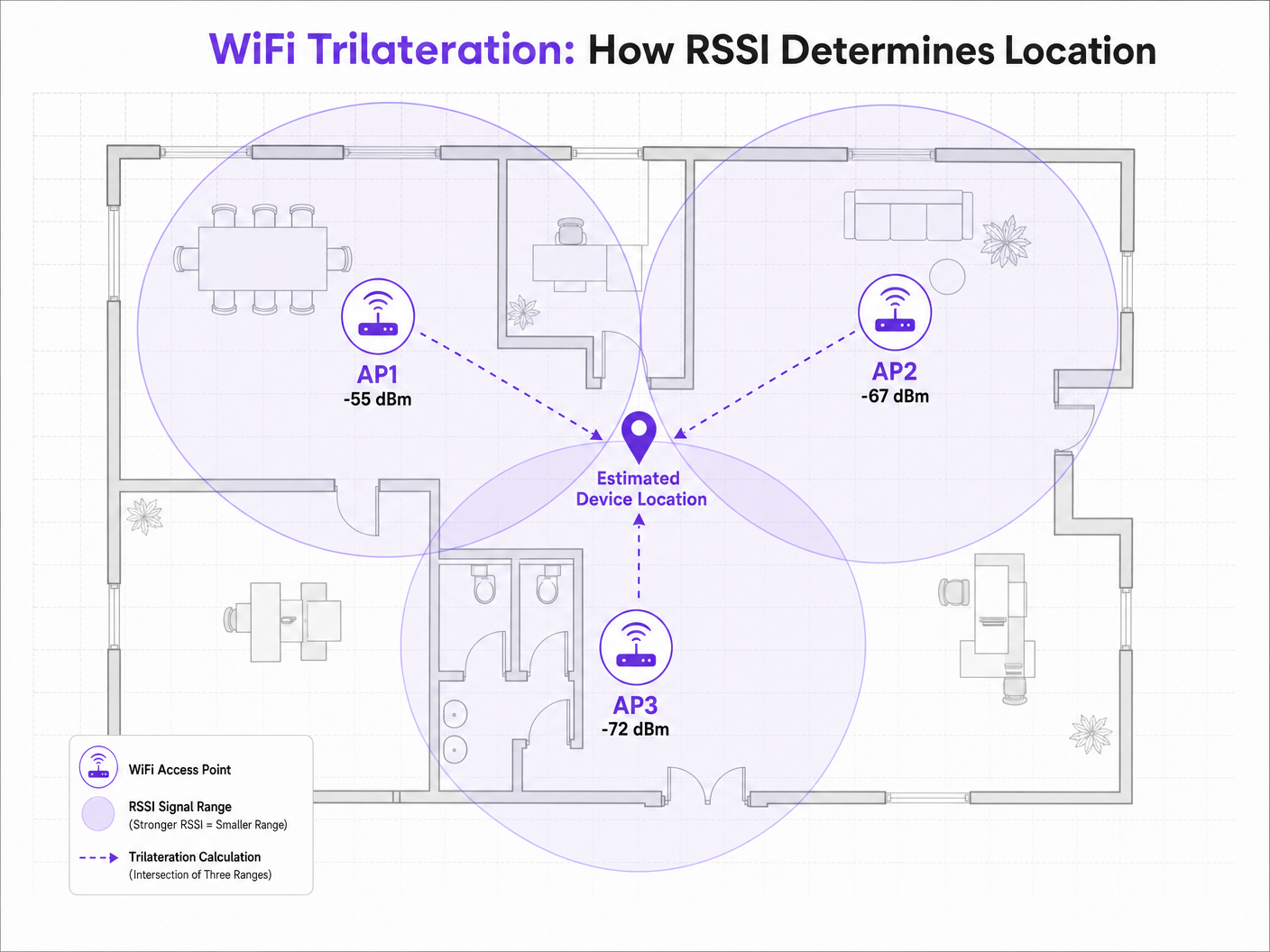
Quando um dispositivo cliente — como um smartphone que emite probe requests — é detetado por um AP, o AP regista o RSSI. Como os sinais de radiofrequência (RF) atenuam (perdem potência) à medida que viajam pelo espaço, o valor de RSSI serve como um indicador de distância. Se três ou mais APs detetarem o mesmo dispositivo e registarem o seu RSSI, o motor de posicionamento pode calcular a distância estimada de cada AP, desenhando círculos virtuais de probabilidade. A interseção destes círculos representa a localização estimada do dispositivo.
O Modelo de Perda de Propagação (Path-Loss)
A relação entre o RSSI e a distância não é linear; segue um modelo logarítmico de perda de propagação. A fórmula padrão utilizada pelos motores de posicionamento é:
RSSI = -10 * n * log10(d) + A
Onde:
- d é a distância a partir do ponto de acesso.
- n é o expoente de perda de propagação, que representa a rapidez com que o sinal se degrada no ambiente específico. No vácuo do espaço livre, n é exatamente 2.0. Em ambientes interiores densos, n pode variar entre 3.0 e 4.5.
- A é o RSSI de referência medido a exatamente 1 metro do AP.
Esta fórmula destaca a razão pela qual a calibração ambiental é crítica. Uma implementação num ambiente de Hospitality com paredes de betão terá um expoente de perda de propagação significativamente diferente de uma área ampla de Retail . Assumir um valor de n padrão em ambientes diversos é a principal causa de uma fraca precisão de wayfinding.
2.4 GHz vs 5 GHz para Posicionamento
Embora a banda de 2.4 GHz ofereça uma melhor penetração através de obstáculos físicos, esta característica é, na verdade, prejudicial para o posicionamento de precisão. A maior pegada de propagação significa círculos de estimativa de distância maiores, resultando numa área de interseção mais ampla e numa menor resolução posicional.
A banda de 5 GHz atenua mais rapidamente, proporcionando limites de sinal mais estreitos e estimativas de distância mais granulares. Para uma precisão de wayfinding ideal, os motores de posicionamento devem priorizar os dados de RSSI de 5 GHz. Este princípio também se aplica a normas mais recentes; embora o Wi-Fi 6 melhore a eficiência geral da rede, a mecânica fundamental do posicionamento por RSSI permanece a mesma, embora a introdução da banda de 6 GHz no Wi-Fi 6E ofereça uma densidade de canais ainda maior e potenciais benefícios de resolução. Para saber mais sobre isto, consulte o nosso guia: Wi-Fi 6 vs Wi-Fi 5: Does it Solve Channel Interference? .
Guia de Implementação
Densidade e Colocação dos Pontos de Acesso
O modo de falha mais comum em implementações de wayfinding é a densidade insuficiente de APs. Uma rede concebida puramente para conectividade (por exemplo, para fornecer acesso a Guest WiFi ) carece frequentemente da densidade necessária para uma trilateração fiável.
Para um posicionamento fiável, um dispositivo cliente deve ser "ouvido" por um mínimo de três APs em simultâneo com um RSSI de -75 dBm ou superior.
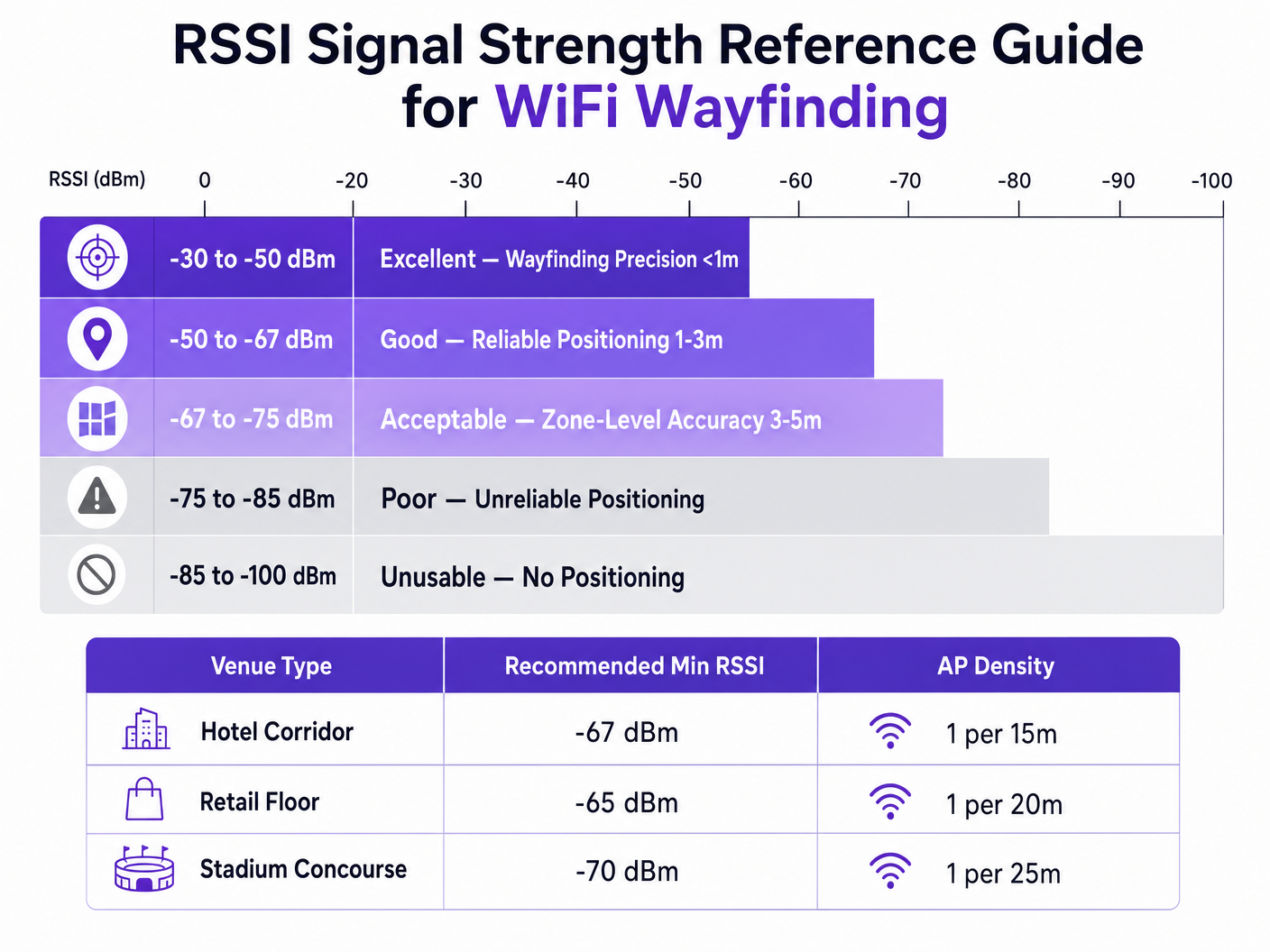
Para atingir uma precisão ideal de 3 a 5 metros, uma regra geral é implementar um AP por cada 15 a 20 metros quadrados, dependendo do ambiente. Além disso, os APs devem ser colocados no perímetro da área pretendida, e não apenas no centro de um corredor, para garantir que a interseção dos círculos de sinal crie um ponto definitivo em vez de uma linha reta.
Metodologias de Calibração
Uma estimativa de distância precisa requer a calibração do motor de posicionamento para o ambiente de RF específico. Existem duas abordagens principais:
- RF Fingerprinting: Isto envolve percorrer fisicamente o local com um dispositivo de levantamento, registando os valores de RSSI em coordenadas conhecidas e construindo uma tabela de consulta abrangente. O motor de posicionamento compara então as leituras de RSSI em tempo real com esta base de dados. Isto proporciona a maior precisão, mas exige muita mão de obra e deve ser repetido se o ambiente físico mudar (por exemplo, exposições sazonais de retalho).
- Posicionamento Baseado em Modelos: Esta abordagem utiliza a fórmula de perda de propagação (path-loss) combinada com parâmetros ambientais (tipos de paredes, alturas dos tetos) definidos no sistema. É mais rápida de implementar e manter e, embora seja ligeiramente menos precisa do que o fingerprinting, é geralmente suficiente para análises ao nível da zona e wayfinding geral.
Boas Práticas
Mitigar a Interferência de Multipercurso
Em ambientes com superfícies altamente refletoras — tais como montras de vidro, estruturas metálicas ou bancadas de estádios — os sinais de RF ressaltam, chegando ao recetor através de múltiplos caminhos. Esta interferência de multipercurso distorce a leitura de RSSI, uma vez que o recetor mede um agregado dos sinais diretos e refletidos, em vez da distância limpa em linha de vista.
A mitigação do multipercurso requer uma combinação de colocação estratégica de APs (evitando cantos altamente refletores), calibração rigorosa e algoritmos de filtragem inteligentes no motor de posicionamento que consigam descartar picos anómalos de RSSI.
Privacidade e Conformidade
Ao recolher dados de localização através de endereços MAC (mesmo que passivamente através de probe requests), as equipas de TI devem garantir a conformidade com os regulamentos de privacidade regionais, como o GDPR.
A implementação da randomização de endereços MAC pelos sistemas operativos móveis modernos impede a monitorização a longo prazo de dispositivos individuais sem autenticação. No entanto, não impede a análise agregada de tráfego pedonal. Para fornecer wayfinding passo a passo individual ou interações personalizadas, os locais devem obter consentimento explícito.
É aqui que a integração de um Captive Portal se torna essencial. Ao exigir que os utilizadores se autentiquem — talvez aproveitando uma solução como How a wi fi assistant Enables Passwordless Access in 2026 — os espaços podem associar legalmente um dispositivo a um indivíduo e fornecer serviços de localização opcionais (opt-in). A plataforma da Purple atua como um fornecedor de identidade gratuito sob a licença Connect, simplificando este requisito de conformidade ao mesmo tempo que fornece WiFi Analytics detalhados.
Resolução de Problemas e Mitigação de Riscos
Quando a precisão da orientação (wayfinding) diminui, as equipas de TI devem avaliar sistematicamente os seguintes vetores:
- Desvio Ambiental: Ocorreram alterações físicas no espaço (novas paredes, inventário denso) que invalidam a calibração original?
- Níveis de Potência dos APs: Os algoritmos de Gestão de Recursos de Rádio (RRM) estão a ajustar dinamicamente a potência de transmissão? Os motores de posicionamento dependem de pontos de referência estáveis; ajustes dinâmicos de potência agressivos irão distorcer os cálculos de distância.
- Variação do Dispositivo do Cliente: Diferentes fabricantes de smartphones utilizam designs de antena variados, o que significa que um Samsung e um iPhone no mesmo local exato podem reportar valores de RSSI diferentes. Os motores de localização avançados utilizam perfis de dispositivos para normalizar estas leituras.
ROI e Impacto no Negócio
O caso de negócio para a implementação de uma orientação WiFi robusta vai muito além de simplesmente mostrar um ponto azul num mapa. Para um Diretor de Tecnologia ou Diretor de Espaço, o ROI é alcançado através da eficiência operacional e da tomada de decisões baseada em dados.
Num centro de Transport , o posicionamento preciso permite a gestão dinâmica de filas e a distribuição de pessoal com base na densidade de passageiros em tempo real. Num ambiente de saúde, facilita a monitorização de ativos para equipamentos médicos de elevado valor, reduzindo o desperdício na aquisição.
Ao padronizar numa plataforma independente de hardware como a Purple, as organizações podem extrair esta inteligência de localização sem ficarem presas a um único fornecedor de infraestrutura, garantindo flexibilidade a longo prazo e maximizando o retorno dos seus investimentos sem fios existentes. Como destacado no nosso anúncio recente, Purple Appoints Iain Fox as VP Growth – Public Sector to Drive Digital Inclusion and Smart City Innovation , a aplicação desta tecnologia está a expandir-se rapidamente para a infraestrutura de cidades inteligentes, demonstrando o seu valor escalável.
Definições Principais
RSSI (Received Signal Strength Indicator)
Uma medição da potência presente num sinal de rádio recebido, expressa em decibéis relativos a um miliwatt (dBm).
A métrica fundamental utilizada pelos motores de posicionamento para estimar a distância entre um dispositivo cliente e um ponto de acesso.
Trilateração
O processo de determinação de localizações absolutas ou relativas de pontos através da medição de distâncias, utilizando a geometria de círculos, esferas ou triângulos.
O algoritmo matemático utilizado pelos motores de localização para calcular a posição de um dispositivo com base em estimativas de distância de múltiplos APs.
Expoente de Perda de Propagação (n)
Uma variável no modelo de propagação de RF que representa a taxa à qual a força do sinal se degrada com a distância num ambiente específico.
Crítico para a calibração; um estádio aberto terá um expoente de perda de propagação menor do que um ambiente de escritório denso com paredes de betão.
RF Fingerprinting
Uma técnica de calibração em que um local é fisicamente analisado para registar os valores reais de RSSI em coordenadas específicas, criando uma base de dados de consulta.
Utilizado quando é necessária uma navegação (wayfinding) de alta precisão, embora acarrete um elevado custo de manutenção operacional.
Interferência de Multipercurso
Um fenómeno na física de rádio em que os sinais de RF atingem a antena recetora através de dois ou mais caminhos devido à reflexão em superfícies.
Uma das principais fontes de imprecisão na navegação (wayfinding), particularmente em locais com vidro, metal ou características arquitetónicas complexas.
Aleatorização de Endereço MAC
Uma funcionalidade de privacidade nos sistemas operativos móveis modernos em que o dispositivo transmite um endereço MAC temporário e aleatório durante os pedidos de deteção (probe requests).
Afeta a capacidade de monitorizar dispositivos individuais ao longo do tempo sem autenticação de rede, exigindo que os locais adaptem as suas estratégias de analítica.
Probe Request
Uma trama (frame) enviada por um dispositivo cliente para determinar quais os pontos de acesso que estão dentro do alcance.
O mecanismo principal para a monitorização passiva de localização, permitindo que os APs registem o RSSI dos dispositivos mesmo que estes não estejam ligados à rede.
Posicionamento Baseado em Modelos
Um método de cálculo de localização que se baseia em algoritmos matemáticos e pressupostos ambientais, em vez de levantamentos físicos do local.
O modelo de implementação preferido para analítica escalável e multi-site, onde a precisão ao nível da zona é suficiente.
Exemplos Práticos
Um hotel resort de 400 quartos está a registar um wayfinding altamente impreciso nos corredores dos hóspedes, com o "ponto azul" a saltar frequentemente entre pisos adjacentes. A rede foi originalmente concebida para conectividade básica com APs colocados a cada 30 metros em linha reta no centro dos corredores.
A equipa de TI deve redesenhar a arquitetura de RF para serviços de localização. Primeiro, aumentar a densidade de APs para aproximadamente um a cada 15 metros para garantir que um mínimo de três APs consigam "ouvir" um dispositivo cliente a -67 dBm ou melhor. Segundo, alternar a colocação dos APs (por exemplo, alternando os lados do corredor ou utilizando quartos adjacentes) em vez de uma linha reta. Uma implementação em linha reta faz com que os círculos de trilateração se cruzem em dois pontos distintos, criando ambiguidade. Finalmente, implementar a calibração de RF fingerprinting especificamente nos corredores para compensar o elevado expoente de perda de propagação causado por portas corta-fogo e paredes de betão.
Uma grande cadeia de retalho pretende implementar análises ao nível da zona para medir o tempo de permanência em departamentos específicos (por exemplo, Eletrónica vs. Vestuário) utilizando a sua infraestrutura Cisco existente. Pretendem evitar a sobrecarga operacional do RF fingerprinting manual em 50 localizações.
Implementar um motor de posicionamento baseado em modelos integrado com os controladores de LAN sem fios Cisco existentes via API. O arquiteto de rede deve definir os parâmetros ambientais específicos (expoente de perda de propagação "n") para o layout típico do piso de retalho. Garantir que os WLCs estão configurados para reportar dados de RSSI de clientes associados e não associados (probe requests). Integrar a plataforma de analytics da Purple para consumir este fluxo de API, mapeando as coordenadas lógicas dos APs no plano físico do piso para estabelecer as zonas analíticas.
Perguntas de Prática
Q1. Está a desenhar a infraestrutura de WiFi para um novo centro de conferências. O requisito principal é uma navegação passo a passo (wayfinding) altamente precisa para os participantes. O arquiteto propõe a colocação de APs de alta densidade exclusivamente no centro dos pavilhões de exposição principais para minimizar os custos de cablagem. Aprova este design?
Dica: Considere como os círculos de trilateração se intersetam quando os APs são colocados num cluster centralizado em vez de uma implementação perimetral.
Ver resposta modelo
Não, este design deve ser rejeitado. Para uma trilateração precisa, os APs devem ser colocados no perímetro do espaço para fornecer ângulos diversos de interseção de sinal. A colocação centralizada de APs resultará em círculos de sinal sobrepostos que não conseguem criar um ponto de interseção definitivo, levando a uma elevada ambiguidade posicional nas extremidades do pavilhão.
Q2. Após uma atualização recente de firmware nos seus controladores de LAN sem fios, a equipa de operações relata que as análises de tempo de permanência nas lojas de retalho se tornaram erráticas, com os dispositivos a parecerem "teletransportar-se" entre zonas. Não foram feitas alterações físicas nas lojas.
Dica: Considere que funcionalidades automatizadas uma atualização de firmware do WLC pode ativar ou alterar em relação à gestão de RF.
Ver resposta modelo
Investigue as definições de Gestão de Recursos de Rádio (RRM) ou de controlo dinâmico de potência de transmissão no WLC. As atualizações de firmware alteram frequentemente a agressividade destes algoritmos. Se os APs estiverem a flutuar rapidamente a sua potência de transmissão para otimizar a conectividade, os cálculos de distância do motor de localização (que dependem de uma potência de referência estável) serão totalmente distorcidos, causando o efeito de "teletransporte". O RRM deve ser ajustado para garantir uma potência de transmissão estável em zonas críticas para a localização.
Q3. O diretor de TI de um hospital quer monitorizar a localização de máquinas de ecografia móveis dispendiosas. Atualmente, dispõem de uma rede WiFi legada desenhada para cobertura básica (mínimo de -75 dBm). Estão a debater-se entre atualizar a rede WiFi para serviços de localização de alta densidade ou implementar uma rede paralela de beacons BLE (Bluetooth Low Energy).
Dica: Avalie as compensações de custo e precisão entre atualizar uma rede WiFi legada versus sobrepor uma solução BLE direcionada para a monitorização de ativos.
Ver resposta modelo
Para uma monitorização precisa de ativos (por exemplo, saber exatamente em que sala se encontra uma máquina), o BLE é frequentemente a solução mais económica e precisa neste cenário. Atualizar uma rede WiFi legada para a densidade necessária para uma navegação de alta precisão (1 AP por cada 15 m²) requer um investimento significativo em cablagem e hardware. A implementação de beacons BLE alimentados a bateria nos ativos e de recetores BLE nas salas proporciona uma maior precisão (devido ao menor alcance e menor potência) sem perturbar a infraestrutura de WiFi existente.
Continue a ler esta série
Medir o ROI de Negócio do Guest WiFi e Analytics de Localização
Este guia fornece uma estrutura técnica e operacional para medir o ROI de negócio do guest WiFi e analytics de localização. Detalha como calcular o valor dos investimentos em hardware através do aumento do tempo de permanência, eficiência operacional e captura de dados primários em setores como retalho, hotelaria e recintos públicos. Os diretores de TI, arquitetos de rede, CTOs e diretores de operações de recintos encontrarão estruturas de medição concretas, estudos de caso do mundo real e orientações de conformidade para justificar e maximizar o seu investimento em WiFi.
Privacy by Design: Anonimização de Dados de WiFi para Conformidade com o GDPR
Este guia de referência detalha a arquitetura técnica e as estratégias de implementação para a anonimização de dados de WiFi para garantir a conformidade com o GDPR. Fornece aos líderes de TI e arquitetos de rede estruturas práticas para equilibrar análises robustas de locais com requisitos estritos de privacidade de dados.
Heatmapping vs Análise de Presença: Diferenças Técnicas
Este guia técnico de referência detalha as diferenças críticas, tanto arquitetónicas como operacionais, entre o heatmapping WiFi e a análise de presença para operadores de espaços empresariais. Disponibiliza aos líderes de TI, arquitetos de rede e diretores de operações estruturas de implementação práticas, cenários de implementação reais e as melhores práticas independentes de fornecedores para extrair o máximo ROI da sua infraestrutura sem fios existente.