Le fonctionnement du guidage WiFi : explication de la trilatération et du RSSI
Ce guide de référence détaille les aspects techniques du guidage WiFi, en expliquant comment la trilatération et les mesures RSSI déterminent la position d'un appareil. Il fournit des stratégies de déploiement concrètes, des méthodologies d'étalonnage et les meilleures pratiques architecturales pour les responsables informatiques qui déploient des services de localisation dans les espaces d'entreprise.
Écouter ce guide
Voir la transcription du podcast

Résumé exécutif
Pour les exploitants de grands sites d'entreprise, le déploiement de services de localisation en intérieur efficaces ne se limite pas à couvrir un espace de points d'accès. Les mécanismes fondamentaux du guidage WiFi — la trilatération et les mesures de l'indicateur d'intensité du signal reçu (RSSI) — dictent les exigences architecturales de tout déploiement réussi. Ce guide propose une analyse approfondie des principes techniques permettant à votre infrastructure sans fil existante de déterminer la position d'un appareil, des variables environnementales critiques qui impactent la précision, et des normes de déploiement nécessaires pour fournir une intelligence de localisation fiable.
Comprendre ces mécanismes est essentiel pour les responsables informatiques et les architectes réseau chargés de fournir une navigation pas-à-pas, du suivi d'actifs ou des analyses de fréquentation. Nous explorons la relation logarithmique entre l'intensité du signal et la distance, la nécessité d'un étalonnage rigoureux, et l'intégration de plateformes d'analyse agnostiques au matériel comme Purple pour extraire une valeur commerciale exploitable de votre environnement RF.
Écoutez notre podcast d'accompagnement :
Analyse technique approfondie
Les fondamentaux du RSSI et de la trilatération
À la base, le guidage WiFi s'appuie sur l'infrastructure sans fil existante pour déterminer l'emplacement physique d'un appareil client. Le mécanisme principal utilisé est la trilatération, souvent confondue, à tort, avec la triangulation. Alors que la triangulation calcule la position en fonction des angles, la trilatération détermine la position en mesurant les distances par rapport à des points de référence connus.
Dans un contexte WiFi, ces points de référence sont vos points d'accès (AP). L'estimation de la distance est dérivée de l'indicateur d'intensité du signal reçu (RSSI). Le RSSI est une mesure de la puissance présente dans un signal radio reçu, exprimée en décibels par rapport à un milliwatt (dBm).
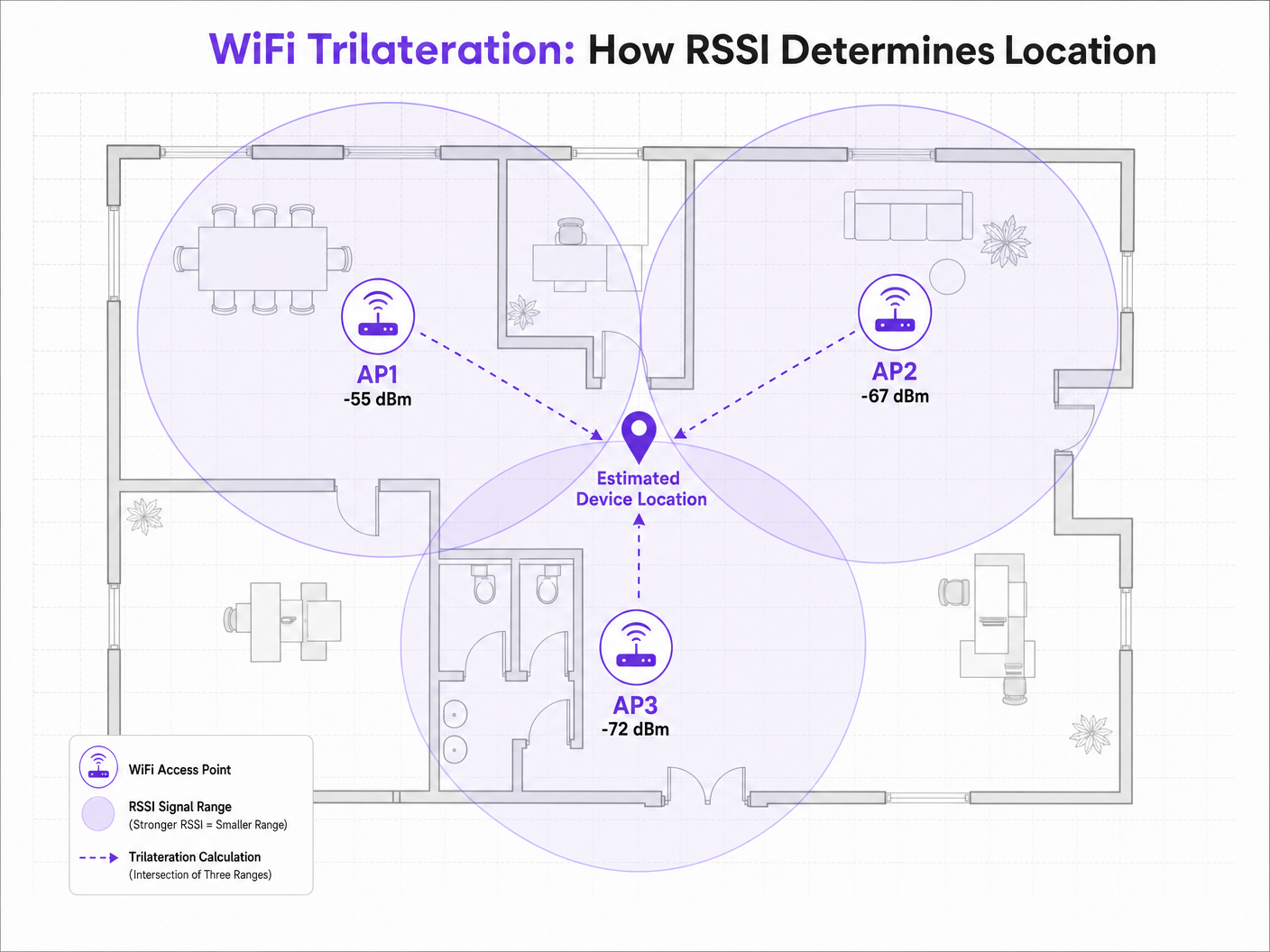 Lorsqu'un appareil client — tel qu'un smartphone diffusant des requêtes de détection (probe requests) — est détecté par une borne d'accès (AP), l'AP enregistre le RSSI. Comme les signaux de radiofréquence (RF) s'atténuent (perdent de la puissance) lorsqu'ils se propagent dans l'espace, la valeur RSSI sert d'indicateur de distance. Si trois AP ou plus détectent le même appareil et enregistrent son RSSI, le moteur de positionnement peut calculer la distance estimée par rapport à chaque AP, en traçant des cercles virtuels de probabilité. L'intersection de ces cercles représente l'emplacement estimé de l'appareil.
Lorsqu'un appareil client — tel qu'un smartphone diffusant des requêtes de détection (probe requests) — est détecté par une borne d'accès (AP), l'AP enregistre le RSSI. Comme les signaux de radiofréquence (RF) s'atténuent (perdent de la puissance) lorsqu'ils se propagent dans l'espace, la valeur RSSI sert d'indicateur de distance. Si trois AP ou plus détectent le même appareil et enregistrent son RSSI, le moteur de positionnement peut calculer la distance estimée par rapport à chaque AP, en traçant des cercles virtuels de probabilité. L'intersection de ces cercles représente l'emplacement estimé de l'appareil.
Le modèle d'atténuation de propagation (Path-Loss)
La relation entre le RSSI et la distance n'est pas linéaire ; elle suit un modèle logarithmique d'atténuation de propagation. La formule standard utilisée par les moteurs de positionnement est la suivante :
RSSI = -10 * n * log10(d) + A
Où :
- d est la distance par rapport à la borne d'accès (AP).
- n est l'exposant d'atténuation de propagation, représentant la rapidité avec laquelle le signal se dégrade dans l'environnement spécifique. Dans le vide spatial, n est exactement égal à 2,0. Dans des environnements intérieurs denses, n peut varier de 3,0 à 4,5.
- A est le RSSI de référence mesuré à exactement 1 mètre de l'AP.
Cette formule montre pourquoi l'étalonnage environnemental est essentiel. Un déploiement dans un environnement de type Hospitality avec des murs en béton aura un exposant d'atténuation de propagation considérablement différent de celui d'un espace de Retail très ouvert. L'adoption d'une valeur n standard pour des environnements divers est la cause principale d'un manque de précision dans le guidage (wayfinding).
2,4 GHz vs 5 GHz pour le positionnement
Bien que la bande 2,4 GHz offre une meilleure pénétration à travers les obstacles physiques, cette caractéristique est en réalité préjudiciable à la précision du positionnement. Une empreinte de propagation plus large implique des cercles d'estimation de distance plus grands, ce qui entraîne une zone d'intersection plus vaste et une résolution de positionnement plus faible.
La bande 5 GHz s'atténue plus rapidement, offrant des limites de signal plus strictes et des estimations de distance plus précises. Pour une précision de guidage optimale, les moteurs de positionnement doivent prioriser les données RSSI de la bande 5 GHz. Ce principe s'applique également aux normes plus récentes ; bien que le Wi-Fi 6 améliore l'efficacité globale du réseau, les mécanismes fondamentaux du positionnement RSSI restent les mêmes, bien que l'introduction de la bande 6 GHz avec le Wi-Fi 6E offre une densité de canaux encore plus élevée et des avantages potentiels en matière de résolution. Pour en savoir plus, consultez notre guide : Wi-Fi 6 vs Wi-Fi 5: Does it Solve Channel Interference? .
Guide d'implémentation
Densité et positionnement des bornes d'accès (AP)
Le mode de défaillance le plus courant dans les déploiements de guidage est une densité d'AP insuffisante. Un réseau conçu uniquement pour la connectivité (par exemple, pour fournir un accès Guest WiFi ) manque souvent de la densité requise pour une trilatération fiable.
Pour un positionnement fiable, un appareil client doit être « entendu » par un minimum de trois AP simultanément avec un RSSI de -75 dBm ou supérieur.
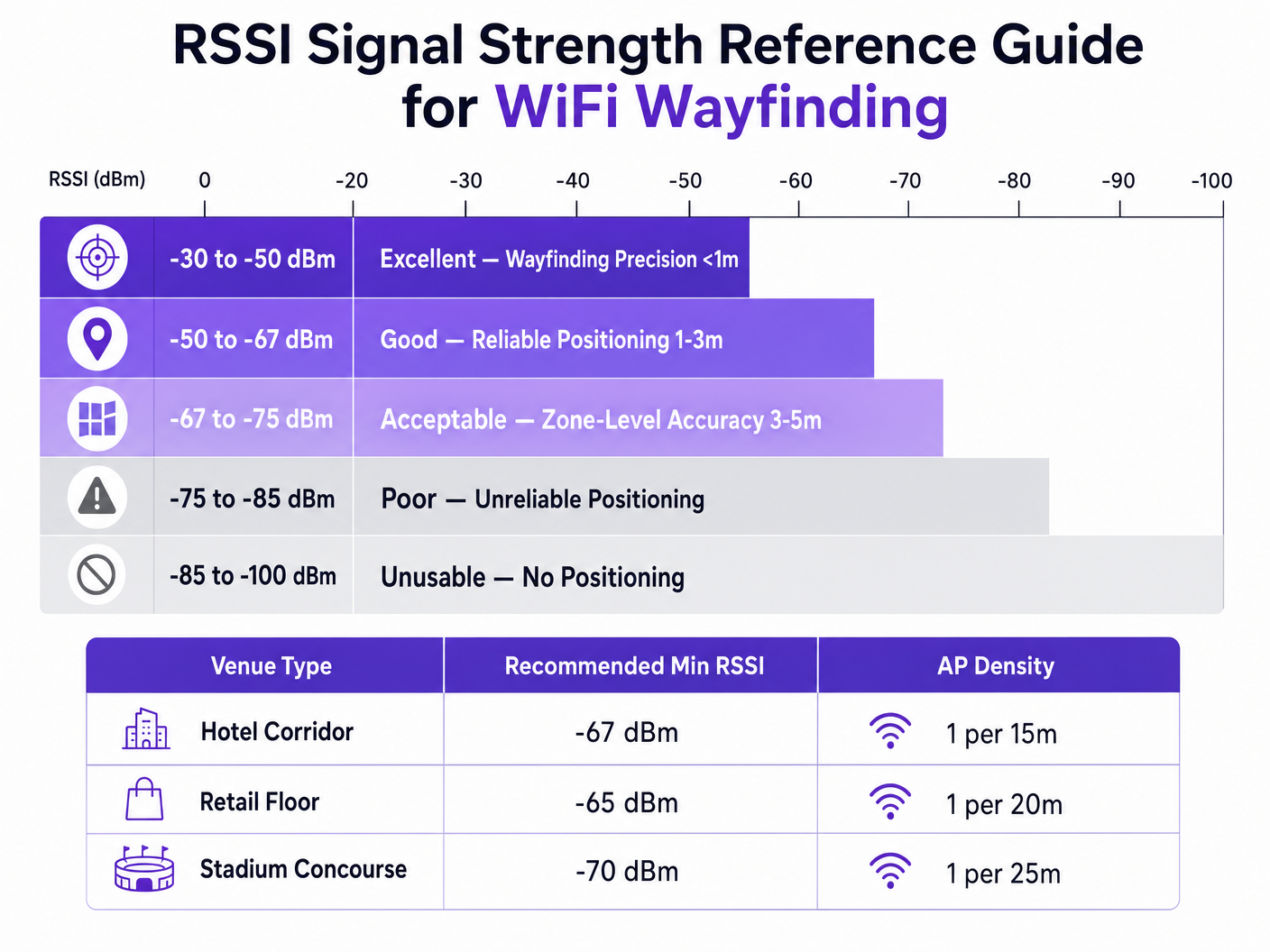
Pour atteindre une précision cible de 3 à 5 mètres, la règle générale consiste à déployer un point d'accès (AP) pour 15 à 20 mètres carrés, selon l'environnement. De plus, les AP doivent être placés sur le périmètre de la zone cible, et pas seulement au centre d'un couloir, afin de garantir que l'intersection des cercles de signal crée un point précis plutôt qu'une ligne droite.
Méthodologies de calibrage
Une estimation précise de la distance nécessite de calibrer le moteur de positionnement en fonction de l'environnement RF spécifique. Il existe deux approches principales :
- La cartographie RF (RF Fingerprinting) : Cela consiste à parcourir physiquement le site avec un appareil de mesure, à enregistrer les valeurs RSSI à des coordonnées connues et à créer une table de correspondance complète. Le moteur de positionnement compare ensuite les relevés RSSI en temps réel avec cette base de données. Cette méthode offre la plus grande précision, mais elle nécessite beaucoup de main-d'œuvre et doit être répétée si l'environnement physique change (par exemple, lors des aménagements saisonniers dans les commerces).
- Le positionnement basé sur un modèle : Cette approche utilise la formule d'affaiblissement de propagation combinée à des paramètres environnementaux (types de murs, hauteurs de plafond) définis dans le système. Plus rapide à déployer et à maintenir, et bien que légèrement moins précise que la cartographie RF, elle est généralement suffisante pour les analyses à l'échelle d'une zone et le guidage général.
Bonnes pratiques
Atténuation des interférences par trajets multiples
Dans les environnements dotés de surfaces hautement réfléchissantes — telles que les vitrines en verre, les structures métalliques ou les gradins de stade — les signaux RF rebondissent et parviennent au récepteur via des trajets multiples. Cette interférence par trajets multiples fausse la lecture du RSSI, car le récepteur mesure un agrégat des signaux directs et réfléchis, plutôt que la distance nette en ligne de visée directe.
L'atténuation des trajets multiples nécessite de combiner un placement stratégique des AP (en évitant les angles hautement réfléchissants), un calibrage rigoureux et des algorithmes de filtrage intelligents au sein du moteur de positionnement capables d'éliminer les pics de RSSI anormaux.
Confidentialité et conformité
Lors de la collecte de données de localisation via les adresses MAC (même de manière passive via les requêtes de sonde), les équipes informatiques doivent veiller à la conformité avec les cadres régionaux de protection de la vie privée tels que le GDPR.
La mise en œuvre de la randomisation des adresses MAC par les systèmes d'exploitation mobiles modernes empêche le suivi à long terme des appareils individuels sans authentification. Cependant, cela ne fait pas obstacle aux analyses globales de fréquentation. Pour proposer un guidage pas-à-pas individuel ou un engagement personnalisé, les sites doivent obtenir un consentement explicite.
C'est là que l'intégration d'un Captive Portal devient essentielle. En obligeant les utilisateurs à s'authentifier — en s'appuyant par exemple sur une solution comme How a wi fi assistant Enables Passwordless Access in 2026 — les établissements peuvent légalement associer un appareil à un individu et proposer des services de localisation opt-in. La plateforme de Purple agit comme un fournisseur d'identité gratuit sous la licence Connect, simplifiant cette exigence de conformité tout en fournissant des WiFi Analytics riches.
Dépannage et atténuation des risques
Lorsque la précision du guidage se dégrade, les équipes informatiques doivent évaluer systématiquement les vecteurs suivants :
- Dérive environnementale : Des modifications physiques ont-elles eu lieu dans l'établissement (nouveaux murs, inventaire dense) qui invalident le calibrage d'origine ?
- Niveaux de puissance des AP : Les algorithmes de Radio Resource Management (RRM) ajustent-ils dynamiquement la puissance de transmission ? Les moteurs de positionnement reposent sur des points de référence stables ; des ajustements dynamiques agressifs de la puissance fausseront les calculs de distance.
- Variabilité des appareils clients : Les différents fabricants de smartphones utilisent des conceptions d'antennes variables, ce qui signifie qu'un Samsung et un iPhone situés exactement au même endroit peuvent signaler des valeurs RSSI différentes. Les moteurs de localisation avancés utilisent le profilage des appareils pour normaliser ces lectures.
ROI et impact commercial
L'intérêt commercial du déploiement d'un guidage WiFi robuste va bien au-delà de l'affichage d'un simple point bleu sur une carte. Pour un Chief Technology Officer ou un directeur d'établissement, le ROI se concrétise par l'efficacité opérationnelle et la prise de décision basée sur les données.
Dans un hub de Transport , un positionnement précis permet une gestion dynamique des files d'attente et le déploiement du personnel en fonction de la densité des passagers en temps réel. Dans un environnement de santé, il facilite le suivi des actifs pour les équipements médicaux de grande valeur, réduisant ainsi le gaspillage lié aux achats.
En se standardisant sur une plateforme agnostique vis-à-vis du matériel comme Purple, les organisations peuvent extraire cette intelligence de localisation sans être enfermées par un seul fournisseur d'infrastructure, garantissant ainsi une flexibilité à long terme et maximisant le retour sur leurs investissements sans fil existants. Comme le souligne notre récente annonce, Purple Appoints Iain Fox as VP Growth – Public Sector to Drive Digital Inclusion and Smart City Innovation , l'application de cette technologie s'étend rapidement aux infrastructures de villes intelligentes, démontrant sa valeur évolutive.
Définitions clés
RSSI (Received Signal Strength Indicator)
Une mesure de la puissance présente dans un signal radio reçu, exprimée en décibels par rapport à un milliwatt (dBm).
La métrique fondamentale utilisée par les moteurs de positionnement pour estimer la distance entre un appareil client et un point d'accès.
Trilatération
Le processus de détermination des positions absolues ou relatives de points par la mesure des distances, en utilisant la géométrie des cercles, des sphères ou des triangles.
L'algorithme mathématique utilisé par les moteurs de localisation pour calculer la position d'un appareil à partir d'estimations de distance provenant de plusieurs points d'accès.
Exposant d'affaiblissement de propagation (n)
Une variable du modèle de propagation RF qui représente le taux de dégradation de la force du signal en fonction de la distance dans un environnement spécifique.
Crucial pour l'étalonnage ; un stade ouvert aura un exposant d'affaiblissement de propagation plus faible qu'un environnement de bureau dense avec des murs en béton.
Empreinte RF (RF Fingerprinting)
Une technique d'étalonnage dans laquelle un site est physiquement inspecté pour enregistrer les valeurs RSSI réelles à des coordonnées spécifiques, créant ainsi une base de données de référence.
Utilisé lorsqu'un guidage de haute précision est requis, bien qu'il entraîne un coût de maintenance opérationnelle élevé.
Interférence par trajets multiples
Un phénomène de physique radio où les signaux RF atteignent l'antenne de réception par deux chemins ou plus en raison de la réflexion sur les surfaces.
Une source majeure d'imprécision dans le guidage, en particulier dans les lieux comportant du verre, du métal ou des caractéristiques architecturales complexes.
Randomisation des adresses MAC
Une fonctionnalité de confidentialité dans les OS mobiles modernes où l'appareil diffuse une adresse MAC temporaire et aléatoire lors des requêtes de sonde (probe requests).
Impacte la capacité à suivre des appareils individuels dans le temps sans authentification réseau, obligeant les sites à adapter leurs stratégies d'analyse.
Requête de sonde (Probe Request)
Une trame envoyée par un appareil client pour déterminer quels points d'accès sont à portée.
Le mécanisme principal pour le suivi de localisation passif, permettant aux points d'accès d'enregistrer le RSSI des appareils même s'ils ne sont pas connectés au réseau.
Positionnement basé sur un modèle
Une méthode de calcul de localisation qui repose sur des algorithmes mathématiques et des hypothèses environnementales plutôt que sur des relevés physiques sur site.
Le modèle de déploiement privilégié pour des analyses évolutives et multi-sites où une précision à l'échelle de la zone est suffisante.
Exemples concrets
Un complexe hôtelier de 400 chambres fait face à un guidage très imprécis dans les couloirs des clients, le « point bleu » sautant fréquemment d'un étage à l'autre. Le réseau a été initialement conçu pour une connectivité de base avec des AP placés tous les 30 mètres en ligne droite au centre des couloirs.
L'équipe informatique doit repenser l'architecture RF pour les services de localisation. Tout d'abord, augmentez la densité des AP à environ un tous les 15 mètres pour garantir qu'au moins trois AP puissent « entendre » un appareil client à -67 dBm ou mieux. Deuxièmement, décalez l'emplacement des AP (par exemple, en alternant les côtés du couloir ou en utilisant les chambres adjacentes) plutôt que de les aligner. Un déploiement en ligne droite amène les cercles de trilatération à se croiser en deux points distincts, créant une ambiguïté. Enfin, mettez en œuvre un étalonnage par empreinte RF spécifiquement dans les couloirs pour compenser l'exposant d'affaiblissement de propagation élevé causé par les portes coupe-feu et les murs en béton.
Une grande chaîne de vente au détail souhaite déployer des analyses au niveau de la zone pour mesurer le temps de visite dans des rayons spécifiques (par exemple, Électronique vs Habillement) en utilisant leur infrastructure Cisco existante. Ils souhaitent éviter la charge opérationnelle liée à l'étalonnage manuel par empreinte RF sur 50 sites.
Déployez un moteur de positionnement basé sur un modèle, intégré aux contrôleurs LAN sans fil Cisco existants via une API. L'architecte réseau doit définir les paramètres environnementaux spécifiques (exposant d'affaiblissement de propagation « n ») pour la configuration type d'un point de vente. Assurez-vous que les WLC sont configurés pour remonter les données RSSI des clients associés et non associés (requêtes de sonde). Superposez la plateforme d'analyse Purple pour consommer ce flux d'API, en associant les coordonnées logiques des AP au plan physique des locaux afin d'établir les zones d'analyse.
Questions d'entraînement
Q1. Vous concevez l'infrastructure WiFi d'un nouveau centre de conférences. La principale exigence est un guidage pas-à-pas très précis pour les participants. L'architecte propose de placer des AP haute densité exclusivement au centre des halls d'exposition principaux afin de minimiser les coûts de câblage. Approuvez-vous cette conception ?
Conseil : Considérez la façon dont les cercles de trilatération s'intersectent lorsque les AP sont placés dans un cluster centralisé par rapport à un déploiement en périphérie.
Voir la réponse type
Non, cette conception doit être rejetée. Pour une trilatération précise, les AP doivent être placés à la périphérie de l'espace afin de fournir des angles d'intersection de signaux diversifiés. Un positionnement centralisé des AP entraînera des cercles de signaux qui se chevauchent sans parvenir à créer un point d'intersection définitif, ce qui se traduira par une forte ambiguïté de positionnement aux limites du hall.
Q2. À la suite d'une récente mise à jour du firmware de vos contrôleurs LAN sans fil, l'équipe des opérations signale que les analyses de temps de séjour dans les magasins de détail sont devenues erratiques, les appareils semblant se « téléporter » d'une zone à l'autre. Aucun changement physique n'a été apporté aux magasins.
Conseil : Considérez quelles fonctionnalités automatisées une mise à jour du firmware du WLC pourrait activer ou modifier concernant la gestion RF.
Voir la réponse type
Analysez les paramètres de gestion des ressources radio (RRM) ou de contrôle dynamique de la puissance de transmission sur le WLC. Les mises à jour de firmware modifient souvent l'agressivité de ces algorithmes. Si les AP font fluctuer rapidement leur puissance de transmission pour optimiser la connectivité, les calculs de distance du moteur de localisation (qui reposent sur une puissance de référence stable) seront totalement faussés, provoquant cet effet de « téléportation ». Le RRM doit être configuré pour garantir une puissance de transmission stable dans les zones critiques pour la localisation.
Q3. Le directeur informatique d'un hôpital souhaite suivre la localisation d'appareils d'échographie mobiles coûteux. Il dispose actuellement d'un réseau WiFi existant conçu pour une couverture de base (-75 dBm minimum). Il hésite entre mettre à niveau le réseau WiFi pour des services de localisation haute densité ou déployer un réseau parallèle de balises BLE (Bluetooth Low Energy).
Conseil : Évaluez les compromis en matière de coût et de précision entre la mise à niveau d'un réseau WiFi existant et le déploiement d'une solution BLE ciblée pour le suivi des actifs.
Voir la réponse type
Pour un suivi précis des actifs (par exemple, savoir exactement dans quelle pièce se trouve une machine), le BLE est souvent la solution la plus rentable et la plus précise dans ce scénario. La mise à niveau d'un réseau WiFi existant vers la densité requise pour un guidage de haute précision (1 AP pour 15 m²) nécessite un investissement important en câblage et en matériel. Le déploiement de balises BLE alimentées par batterie sur les actifs et de récepteurs BLE dans les pièces offre une plus grande précision (en raison d'une portée plus courte et d'une puissance plus faible) sans perturber l'infrastructure WiFi existante.
Continuer la lecture de cette série
Mesurer le ROI commercial du WiFi invité et du Location Analytics
Ce guide fournit un cadre technique et opérationnel pour mesurer le ROI commercial du WiFi invité et du location analytics. Il détaille comment calculer la valeur des investissements matériels grâce à l'augmentation du temps de séjour, à l'efficacité opérationnelle et à la collecte de données de première partie (first-party) dans le commerce de détail, l'hôtellerie et les espaces publics. Les responsables informatiques, les architectes réseau, les CTO et les directeurs de l'exploitation des sites y trouveront des cadres de mesure concrets, des études de cas réelles et des conseils de conformité pour justifier et maximiser leur investissement WiFi.
Privacy by Design : Anonymiser les données WiFi pour la conformité GDPR
Ce guide de référence détaille l'architecture technique et les stratégies de mise en œuvre pour anonymiser les données WiFi afin de garantir la conformité GDPR. Il fournit aux responsables informatiques et aux architectes réseau des cadres exploitables pour concilier des analyses de site robustes avec des exigences strictes en matière de confidentialité des données.
Heatmapping vs Presence Analytics : Différences techniques
Ce guide technique de référence détaille les différences architecturales et opérationnelles cruciales entre le heatmapping WiFi et les presence analytics pour les exploitants de sites d'entreprise. Il fournit aux responsables informatiques, architectes réseau et directeurs des opérations des cadres de déploiement exploitables, des scénarios d'implémentation réels et des meilleures pratiques neutres vis-à-vis des fournisseurs pour maximiser le ROI de leur infrastructure sans fil existante.